
28 November 2017. Engineering researchers created artificial muscles for robotics using principles from origami, or Japanese paper folding, with high strength and low-cost materials. A team from the Wyss Institute at Harvard University and the Computer Science and Artificial Intelligence Laboratory or CSAIL, at Massachusetts Institute of Technology, describes its technology in yesterday’s issue of Proceedings of the National Academy of Sciences.
Artificial muscles are mechanisms for moving objects, much like natural muscles in humans and animals. Robotic systems designed for interacting with humans, including wearable prosthetics and medical devices, can use mechanisms like artificial muscles, which also need to remain soft and flexible. These qualities have up to now meant sacrificing strength for flexibility, and required special materials that run up their costs.
The Wyss Institute/CSAIL team led by Harvard engineering professor Robert Wood and MIT’s Daniela Rus are seeking to develop a platform for producing artificial muscles, applying a set of principles to identify materials that deliver the properties needed for soft robotics. Artificial muscles produced by this technology, say the authors, must make complex movements, yet still be easy to operate, low in cost, and scalable to larger or smaller devices.
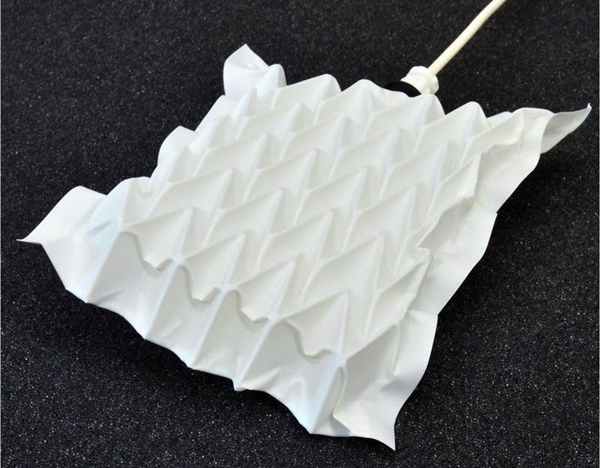
Wood, Rus, and colleagues applied three basic features in their solutions: (1) a compressible solid skeleton structure, (2) a flexible, but tight skin covering the structure, and (3) an internal fluid that fills the space between the skeleton and the skin. For the skeletons, the team looked to origami, a Japanese art form producing elegant designs folded from single sheets of paper, but also in some cases simple coils or solid materials with hinges. As reported by Science & Enterprise in May 2016, an MIT team led by Rus developed tiny ingestible robotic devices also with origami properties.
The researchers prepared several different artificial muscle devices based on these principles. The team uses common, readily-available materials, such as polyether ether ketone, or PEEK, a bio-compatible polymer cut from large sheets, or 3-D printed. Another device is cast from silicone rubber, while still others are laser-cut and folded from polyester sheets, or polyvinyl alcohol a water-soluble material. Outer skins are often made from nylon fabric, in some cases coated with polyurethane.
The artificial muscles are contracted with a vacuum that reduces the size of the devices up to 10 percent of the original. The origami structure in the skeletons allow for programming the devices to bend in predictable patterns, with many degrees of freedom of movement. Grippers or robotic hands for lifting and moving objects can also be added to the devices.
The ability to program the folding patterns, say the researchers, makes it possible to simplify the intelligence needed in the overall robotic system. “Incorporating intelligence into the body,” notes Rus in a joint statement, “via specific folding patterns in the case of our actuators, has the potential to simplify the algorithms needed to direct the robot to achieve its goal. All these actuators have the same simple on/off switch, which their bodies then translate into a broad range of motions.”
The researchers report they can make a single artificial muscle device with materials costing less than $1.00. Tests of the devices show they can lift up to 6 times more force per unit of area than human skeletal muscles. The authors say these artificial muscles can be designed and produced quickly, in about 10 minutes, for use in miniature medical devices, robotic exoskeletons, and deployed in spacecraft.
The following video demonstrates several artificial muscles.
- Snake-Like Intelligent Robot in Development
- Origami Robotics Designed for Fragile Objects
- Exosuit Shown to Improve Walking for Stroke Patients
- Robot Designed to Grow into Shapes, Spaces
- Algorithm Quickly Customizes Walking Exoskeleton
* * *